







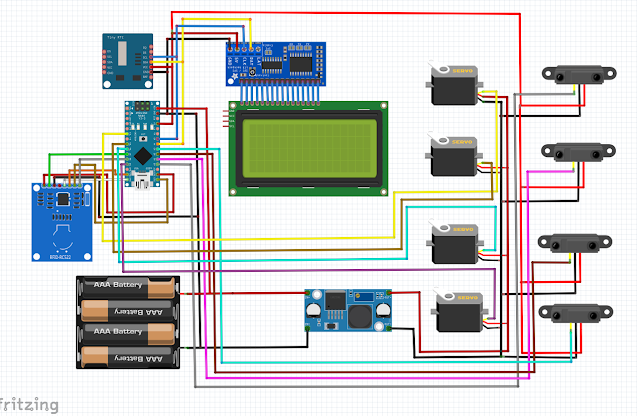
SƠ ĐỒ NGUYÊN LÝ:
#include <Servo.h>
#include <SPI.h>
#include <MFRC522.h>
#include <Wire.h>
#include <LiquidCrystal_I2C.h>
#include <DS1307.h>
#include <EEPROM.h>
Servo servo;
Servo servo1;
Servo servo2;
Servo servo3;
uint8_t sec, min, hour, day, month;
uint16_t year;
DS1307 rtc;
LiquidCrystal_I2C lcd(0x27,20,4);
#define SS_PIN 8
#define RST_PIN 7
#define sensor A0
#define sensor1 A1
#define sensor2 A2
#define sensor3 A3
MFRC522 rfid(SS_PIN, RST_PIN); // Instance of the class
MFRC522::MIFARE_Key key;
char j;
int val=0,val1=0,val2=0,val3=0;
int dem=0,vong=0;
int error=0;
byte nuidPICC[]={0xE9, 0xBF, 0x7A, 0x3C},
nuidPICC1[]={0x99, 0x94, 0x7E, 0x3C},
nuidPICC2[]={0x49, 0x08, 0x7D, 0x3C},
nuidPICC3[]={0x19, 0x43, 0xC5, 0x3C};
byte cus[] = {
B00100,
B00100,
B00100,
B00100,
B00100,
B00100,
B00100,
B00100
};
int i,tang=0, bien;
void hienthi(){
rtc.get(&sec,
&min, &hour, &day, &month, &year);
lcd.setCursor(0,2);
lcd.print(" Vi
tri | Trang thai");
lcd.setCursor(0,3);
lcd.print(" | ");
lcd.setCursor(10,0);
lcd.print(hour/10,
DEC);
lcd.setCursor(11,0);
lcd.print(hour%10,
DEC);
lcd.setCursor(13,0);
lcd.print(min/10,
DEC);
lcd.setCursor(14,0);
lcd.print(min%10,
DEC);
lcd.setCursor(8,1);
lcd.print(day/10,
DEC);
lcd.setCursor(9,1);
lcd.print(day%10,
DEC);
lcd.setCursor(11,1);
lcd.print(month/10,
DEC);
lcd.setCursor(12,1);
lcd.print(month%10,
DEC);
lcd.setCursor(14,1);
lcd.print(year,
DEC);
}
void setup() {
Serial.begin(9600);
servo.attach(3);
servo1.attach(5);
servo2.attach(6);
servo3.attach(9);
servo.write(100);
servo1.write(98);
servo2.write(98);
servo3.write(98);
SPI.begin();
rtc.start();
//rtc.set(0, 31, 21, 23, 10, 2019); //08:00:00 24.12.2014
//sec, min, hour, day, month, year
lcd.init();
lcd.backlight();
lcd.createChar(1, cus);
rfid.PCD_Init();
lcd.setCursor(0, 0);
lcd.print("--------------------");
lcd.setCursor(0, 1);
lcd.print(" Le
Vinh Thinh ");
lcd.setCursor(0, 2);
lcd.print("
MSSV: 2202180032 ");
lcd.setCursor(0, 3);
lcd.print("--------------------");
delay(3300);
lcd.setCursor(0, 1);
lcd.print(" Do
an mon hoc ");
lcd.setCursor(0, 2);
lcd.print(" Nha xe thong minh ");
delay(3300);
lcd.setCursor(0,0);
lcd.print("Time :
: ");
lcd.setCursor(0,1);
lcd.print("Date :
/ / ");
lcd.setCursor(0,2);
lcd.print(" Vi tri | Trang thai");
lcd.setCursor(0,3);
lcd.print("
| ");
}
void door(){
if ( !
rfid.PICC_IsNewCardPresent())
return;
// Verify if the
NUID has been readed
if ( !
rfid.PICC_ReadCardSerial())
return;
if (
rfid.uid.uidByte[0] == nuidPICC[0] &&
rfid.uid.uidByte[1] == nuidPICC[1] &&
rfid.uid.uidByte[2] == nuidPICC[2] &&
rfid.uid.uidByte[3] == nuidPICC[3] ) {
val++;
lcd.setCursor(1,3);
lcd.print("Cot A");
if(val==1){
lcd.setCursor(12,3);
lcd.print("Gui xe");
while(digitalRead(sensor)==1){servo.write(10);};
servo.write(100);
delay(100);
}
if(val==2){
lcd.setCursor(12,3);
lcd.print("Lay xe");
servo.write(10);
delay(200);
while(digitalRead(sensor)==0);
delay(1000);
servo.write(100);
delay(100);
val=0;
}}
////-------------------------------------------------------------------------------
if (
rfid.uid.uidByte[0] == nuidPICC1[0] &&
rfid.uid.uidByte[1] == nuidPICC1[1] &&
rfid.uid.uidByte[2] == nuidPICC1[2] &&
rfid.uid.uidByte[3] == nuidPICC1[3] ) {
val1++;
lcd.setCursor(1,3);
lcd.print(" Cot
B ");
if(val1==1){
lcd.setCursor(12,3);
lcd.print("Gui xe");
while(digitalRead(sensor1)==1){servo1.write(5);};
servo1.write(98);
delay(100);
}
if(val1==2){
lcd.setCursor(12,3);
lcd.print("Lay xe");
servo1.write(5);
delay(200);
while(digitalRead(sensor1)==0);
delay(1000);
servo1.write(98);
delay(100);
val1=0;
}}
//
//---------------------------------------------------------------------------------
if (
rfid.uid.uidByte[0] == nuidPICC2[0] &&
rfid.uid.uidByte[1] == nuidPICC2[1] &&
rfid.uid.uidByte[2] == nuidPICC2[2] &&
rfid.uid.uidByte[3] == nuidPICC2[3] ) {
val2++;
lcd.setCursor(1,3);
lcd.print("Cot C");
if(val2==1){
lcd.setCursor(12,3);
lcd.print("Gui xe");
while(digitalRead(sensor2)==1){servo2.write(5);};
servo2.write(98);
delay(100);
}
if(val2==2){
lcd.setCursor(12,3);
lcd.print("Lay xe");
servo2.write(5);
delay(200);
while(digitalRead(sensor2)==0);
delay(1000);
servo2.write(98);
delay(100);
val2=0;
}}
//-----------------------------------------------------------------------------------
if (
rfid.uid.uidByte[0] == nuidPICC3[0] &&
rfid.uid.uidByte[1] == nuidPICC3[1] &&
rfid.uid.uidByte[2] == nuidPICC3[2] &&
rfid.uid.uidByte[3] == nuidPICC3[3] ) {
val3++;
lcd.setCursor(1,3);
lcd.print("Cot D");
if(val3==1){
lcd.setCursor(12,3);
lcd.print("Gui xe");
while(digitalRead(sensor3)==1){servo3.write(5);};
servo3.write(98);
delay(100);
}
if(val3==2){
lcd.setCursor(12,3);
lcd.print("Lay xe");
servo3.write(5);
delay(200);
while(digitalRead(sensor3)==0);
delay(1000);
servo3.write(98);
delay(100);
val3=0;
}}
//------------------------------------------------------------------------------------
if (
rfid.uid.uidByte[0] != nuidPICC[0] &&
rfid.uid.uidByte[0] != nuidPICC1[0] &&
rfid.uid.uidByte[0] != nuidPICC2[0] &&
rfid.uid.uidByte[0] != nuidPICC3[0] ){
lcd.setCursor(0,2);
lcd.print(" Ma
the sai!!! ");
lcd.setCursor(0,3);
lcd.print(" Vui long doi: % ");
for(error=0;error<=100;error++){
lcd.setCursor(15,3);
lcd.print(error);
delay(500); }
lcd.setCursor(0,3);
lcd.print(" Scan
card again ");
delay(3000);
}
rfid.PCD_StopCrypto1();
}
void loop() {
door();
hienthi();
}
 ( Nguyên lý + Code chuẩn) Link Mediafire
( Nguyên lý + Code chuẩn) Link MediafireKhi nhấn nút "Tải Về Máy", bạn sẽ vào trang quảng cáo, vui lòng chờ 5 giây. Nút
 hiện ra ở góc phải phía trên, nhấn vào để đến trang download
hiện ra ở góc phải phía trên, nhấn vào để đến trang download------------------------------------------------------------------------------------
DV1 - NHẬN VẼ MẠCH - LẬP TRÌNH 8051/ARDUINO/STM LẤY TRONG NGÀY
BẤM XEM CÁCH ĐẶT HÀNG TẠI ĐÂY


-----------------------------------------------------------------------------------
DV2 - Mua linh kiện về làm mạch nhanh - Miễn phí Ship

DV3 - Kênh youtube chia sẻ kiến thức điện tử thực hành ngay

DV4 - Kênh cộng đồng Facebook Điện Tử ChipKool
CÔNG TY ECHIPKOOL - UY TÍN - CHẤT LƯỢNG - NHANH CHÓNG - BẢO MẬT







